Нанотехнологиям и нанофизическим
исследованиям сегодня уделяется большое внимание. Лидерами являются, как
правило, высокоразвитые страны, имеющие большой экономический и
научно-технический потенциал. Это связано со сложностью технологической
оснастки, наличием и востребованностью специалистов высокой квалификации,
большими инвестициями.
Нанотехнология
определяется как ''…совокупность способов и приемов создания функциональных
элементов нанометровых размеров на поверхности подложек, в том числе из
отдельных молекул и атомов, с возможностью одновременной их визуализации и
контроля'' [1]. Сканирующая зондовая микроскопия (СЗМ) [2-4] в значительной
степени удовлетворяет приведенному определению, и именно она предоставляет и
другой путь участия в наноисследованиях. Этот путь предполагает привлечение
более дешевой техники, не требующей специальных помещений для технологических
операций и многочисленного высококвалифицированного
персонала.
Принцип работы СЗМ позволяет
манипулировать нано- и субнано объектами и создавать их, локально активизировать
химические реакции, например, производить операции окисления или травления и
организовывать атомномасштабную архитектуру на поверхности материалов
твердотельной электроники [1- 3].
Физика
наномасштабных элементов диктует специфику инструментов для наноисследований.
Пример этого - СЗМ.
Принципы работы зондовой
микроскопии требуют создания наномасштабного зазора игла-поверхность, в котором
основную роль начинают играть и зависимости считываемого (конкретным видом
микроскопа) сигнала от величины этого зазора. Эту ситуацию можнo назвать режимом
ближнего поля. В технике СЗМ такой зазор достигается применением специально
сконструированных прецизионных двигателей. Кроме того, в микроскопии необходима
организация X,Y-сканирования и одновременного поддержания устойчивого сигнала
обратной связи, обеспечивающего этот ''штатный режим'' работы. Требуется и
специальное программное обеспечение как для управления работой микроскопа, так и
последующей обработки полученных данных.
В то
же время из многих научных публикаций, посвященных зондово-микроскопическим
исследованиям, следует, что научно-практический интерес могут представлять как
сам зазор зонд-поверхность, являясь наномасштабной конфигурацией, так и
отдельные узлы этих устройств [5-7].
Несмотря
на значительный прогресс в промышленном производстве СЗМ последние все еще
остаются довольно дорогими приборами и далеко не каждая исследовательская
организация имеет возможность его приобретения. Поэтому, как нам кажется, может
быть востребовано предлагаемое простое и не дорогое устройство, легко
реализующее режим ''ближнего поля''. Это позволит провести исследования как
самого зазора, зависимости его поведения от разнообразных внешних факторов, так
и предложить новые технические решения в зондовой микроскопии, адаптирующие
прибор к конкретным исследовательским задачам.
Одним из возможных принципов для реализации подобного устройства -
измерительного стенда наноразмерного зазора - является создание условия, при
котором проявляется регистрируемый туннельный ток. Опыт создания лабораторного
зондового микроскопа [8] и работы с ним подсказал, что использовать туннельный
ток в качестве информативного сигнала в ближнеполевом режиме проще (нет
необходимости в применении кантилевера и соответствующей техники измерения его
отклонения) и зачастую нужнее (из-за появления возможности исследования и
электрофизических свойств исследуемых объектов). Известно (например [2-4]), что
туннельный ток (IT) зависит от площади поперечного сечения S,
''канала'' для туннелирующих электронов, величины средней работы выхода
материалов зонда и поверхности (VT = fз + fп)/2), напряжения
зонд-поверхность Uсм и самого зазора между
зондом и поверхностью HT. Таким образом, комплекс этих измеряемых
параметров такого туннельно-токового стенда может предоставить, например,
информацию о качестве самого зонда, вольт-амперной характеристике HT
и ее отклика на процессы в нем. Сама система обратной связи, применяемая в
технике поддержания режима ближнего поля, позволяет прямо измерять и размеры
Hз [9].
Основными условиями для функционирования зондового микроскопа являются:
организация прецизионного подвода (позиционирование) зонда к исследуемой
поверхности (ИП) на столь малое расстояние, при котором начинают проявляться
ближнеполевые эффекты; обеспечение отслеживающим позиционером поддержания
ближнеполевого зазора - замыкающего звена в цепи обратной связи (ОС);
X,Y-сканирование с устойчивым отслеживающим сигналом ОС; создание
соответствующего программного обеспечения СЗМ.
Предлагаемое устройство не нуждается в сканировании, так как здесь
отсутствует задача собственно микроскопирования, что значительно упрощает его
техническое осуществление, а создание необходимого зазора достигается здесь
отводом зонда, изначально находящегося в гальваническом контакте с проводящей
поверхностью, на задаваемое расстояние (H3). Востребованность в СЗМ
технике специально разработанных микродвигателей позиционирования зонда (для
достижения аналогичного рабочего зазора) в основном диктуется необходимостью
сохранить латеральное (вдоль плоскости исследуемой поверхности) пространственное
разрешение микроскопа, которое определяется также и радиусом кривизны кончика
зонда-иглы (при соударении с исследуемым объектoм (ИО) игла ''притупляется'').
Способом отвода значительно упрощается организация ближнеполевого режима, о
создании которого информирует регистрируемое изменение природы тока контакта
поверхность/зонд с проводящего (Inp) на туннельный ток
(IT). Здесь применяется техника отслеживания постоянства заданного
порогового значения IТ, но с облегчением задачи стабилизации ОС
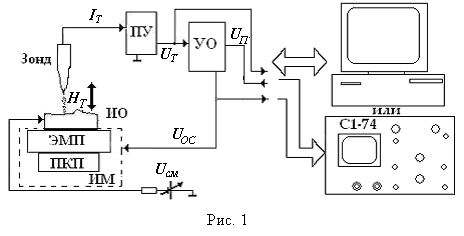
(сканеры в стенде отсутствуют). На рис.1 представлена принципиальная блок-схема
стенда, обеспечивающая туннельно-токовый контроль заданной величины зазора. При
отводе поверхности ИО от зонда гальванический контакт зонд/поверхность
обрывается, что приводит к крутому падению исходной величины тока, формируемого
перестраиваемым напряжением Uсм. Ток
преобразуется в предварительном усилителе (ПУ) в напряжение UT,
поступающее на устройство отслеживания (УО). Оно измеряет спадающее
UT и, сравнивая с заданным пороговым Uп, выдает разностный сигнал D,
формирующий управляющее ОС напряжение UOC для исполнительного
механизма (ИМ), корректирующего зазор HT. ИМ представляет собой
совмещение электромагнитного позиционера (ЭМП) с пьезокерамическим позиционером
(ПКП). В используемом измерительном приборе одновременно наблюдается
трансформация гальванического контакта в туннельный (поведение UT) и
формирование и изменение UOC. Помимо ручного, предусмотрено и
компьютерное управление работой стенда (помимо регистрации UT и
UOC задаются Uсм и пороговое
напряжение - UП).
|
|