ИЗМЕРИТЕЛЬНАЯ ТЕХНИКА
УДК 622.7 (088.8)
Б. М. Мамиконян, С. Г. Кюрегян,
А. С. Шахкамян
Микропроцессорный измеритель плотности и уровня
пульпы
(Представлено академиком А.А. Терзяном 3/IX
2002)
Технологический процесс флотационного
обогащения руд требует непрерывного контроля плотности пульпы с целью ее
стабилизации.
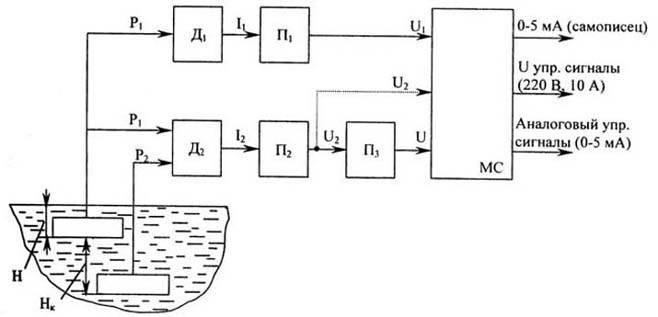
Наиболее целесообразным является
пьезометрический способ, основанный на измерении разности давлений между двумя
точками контролируемой пульпы с помощью колокольных датчиков, погруженных на
различные глубины [1, 2] (рис. 1). Под воздействием гидростатического давления
пульповоздушной смеси в подколокольных объемах воздуха образуются избыточные
давления
| P1 = rg H;
P2 = rg
(H + HK), | |
где r - плотность пульпы, кг/м3; g = 9.8
м/с2 - ускорение свободного падения; H - текущее значение уровня
пульпы над первым колокольным датчиком, м; HK - межколокольное
фиксированное расстояние, м.
Рис. 1. Принципиальная схема измерителя
Измеряемая плотность пульпы связана с
разностью давлений выражением
Давления P1 и DP преобразуются в аналоговые электрические сигналы с помощью
датчиков Д1 и Д2, в качестве которых выбраны серийно
выпускаемые унифицированные полупроводниковые тензорезисторные преобразователи
типа Сапфир-22М [3-5]. В технологической линии избыточное давление пульпы может
доходить до 16 кПа, а разность давлений - до 3.6 кПа. Исходя из этого для
измерения избыточного давления P1 использован датчик давления типа
Сапфир-22М-ДИ модели 2130, а для измерения разности давлений DP - дифманометр типа Сапфир-22М-ДД модели 2420. С помощью
преобразователей П1 и П2 эти сигналы преобразуются в
сигналы напряжения U1 и U2, определяемые выражениями:
где K1 = g · KД1 · RH1; K2 = gHK · KД2 · RH2; KД1, KД2 - коэффициенты
преобразования датчиков Д1 и Д2 соответственно;
RH1, RH2-нагрузочные сопротивления, подключаемые к выходам
Д1 и Д2 для преобразования токового сигнала в напряжение.
Таким образом, по измеренным значениям
напряжений U1 и U2 можно вычислить значения плотности и
уровня (относительно фиксированного уровня HK) пульпы по следующим
выражениям:
Плотность пульпы в процессе флотации
изменяется в небольших пределах, от нижнего rН = 1100 кг/м3 до верхнего rВ = 1600 кг/м3. Поэтому для «расширения
шкалы» измерения плотности «обнулим» нижний предел и будем измерять приращение
плотности Dr = r - rH:
где r -
текущее значение плотности пульпы; K3 - коэффициент преобразования
П3.
Датчики Сапфир могут быть настроены на любой
верхний предел измерения, не выходящий за крайние значения, предусмотренные для
данной модели. С другой стороны, в технологическом процессе требуемая
минимальная плотность пульпы может иметь различные значения: 1100, 1200 и 1300
кг/м3. Поэтому целесообразно перенастройку выходной характеристики
дифференциального датчика Д2 производить схемным путeм с помощью
преобразователя П3 (рис. 1), первоначально настроив Д2 на
необходимое верхнее значение DPm = DPB, которому будет соответствовать значение
выходного тока I2m = I2B = 5 мА.
Рис. 2. Схема дополнительного преобразователя
Разработанная схема преобразователя
П3 (рис. 2) состоит из двух узлов: узла подавления начального
сигнала, соответствующего значению rН, и
нормирующего усилителя с настраиваемым коэффициентом усиления. Узел подавления
представляет собой делитель напряжения (ДН) (сопротивление R0 с
несколькими плечами сопротивлений R1i), питаемый от источника
стабилизированного напряжения (ИСН). Выходной токовый сигнал I2
датчика Д2 преобразуется в сигнал напряжения U2 путем
пропускания выходного тока через высокоточный резистор RH2. Выбирая
RH2 = 2 кОм, получим U2B = I2B · RH2 = 10 B, что соответствует установленному верхнему значению DPB (или rB).
Различным требуемым начальным значениям rHi
будут соответствовать падения напряжения на резисторе R0, равные
| U0i = U2BrHi/rB = UuR0/(R0 + R1i). | |
(5) |
Так как напряжение U0i может
доходить до 8В, целесообразно выбрать сопротивление R0=10 кОм и
питать схему от параметрического стабилизатора. Сопротивления плеч делителя
напряжения рассчитываются по формуле R1i = (
U2/U0i - 1) R0, где
Uu - напряжение ИСН.
В схеме (рис. 2) разностный сигнал DUi = U2 - U0i поступает на вход неинвертирующего усилителя.
Поскольку значению максимальной плотности пульпы должен соответствовать
максимальный сигнал UB = U2B = 10B на выходе усилителя, то для
нормирования выходного сигнала усилителя сигнал DUi необходимо усиливать с различными
коэффициентами усиления Ki в зависимости от значений rHi. Значения этих коэффициентов должны
удовлетворять условию UB = K3i(U2B - U0i), следовательно, с учетом (5), получим
| K3i = U2B/(U2B - U0i) = rB/(rB - rHi). | |
Усилитель разностного сигнала построен на
прецизионном ОУ типа К140УД27А. Сопротивления резисторов обратной связи
вычисляются по известной формуле
Коэффициенты K1, K2 в
выражениях (1) и Ki = K2 K3i в выражении (4)
можно вычислить также исходя из предельного значения напряжения
U = UB = 10 В при r = rB:
| K1 = 10/rBHm; K2 = 10/rB; Ki = 10/(rB - rHi), | |
где
Hm - максимальный уровень пульпы над первым колокольным датчиком.
Сигналы U1, U2 и U
поступают на вход АЦП микропроцессорной системы (МС) для преобразования в
кодовые эквиваленты, обработки информации, формирования, усиления и выдачи
управляющих сигналов. С помощью полученных формул (2) - (4) МС производит (по
установленной программе) расчет уровня и плотности пульпы с частотой 1 Гц.
МС построена на базе микропроцессорного набора КР580 и представляет собой
программируемый узел с ПЗУ и ОЗУ с объемами памяти 8 и 2 Кб соответственно. МС
выдает также токовый сигнал, пропорциональный разности давлений, для управления
исполнительными механизмами системы регулирования плотности пульпы.
Оценим погрешности измерения уровня и
плотности пульпы.
Номинальную функцию преобразования значения
плотности пульпы получим из (2):
Источниками инструментальной погрешности при
определении значения плотности пульпы по (6) являются погрешности измерения
напряжения U2, установки уровня HK, погрешности
дифференциального датчика давления Д2 и
сопротивления RH2:
| d(r) = d(U2) - d(HK) - d(Д2) - d(RH2) + d(N), | |
где
d(·) - относительные значения
перечисленных погрешностей, d(N) - относительное
значение погрешности вычисления и округления результата.
Распространяя относительные погрешности d(i) на множество реализаций и учитывая статистическую
независимость составляющих погрешностей, определим математическое ожидание (МО)
и среднеквадратическое отклонение (СКО) относительных погрешностей:
| m(r) = m(U2) - m(HK) - m(Д2) - m(RH2) + m(N), | |
| s(r) = |
Ц
|
s2(U2) + s2(HK) + s2(Д2) + s2(RH2) + s2(N)
|
, | |
где
m(i), s(i) - МО и СКО относительных погрешностей
соответственно.
Оценка погрешности измерения результата
зависит от способа нормирования метрологических характеристик применяемых
средств измерений (СИ).
Если удается исключить систематическую
составляющую погрешности результата, например, калибровкой прибора, то
инструментальную погрешность измерения плотности пульпы можно оценить в виде
предела допускаемой относительной погрешности (ГОСТ 8.009-84):
где kr - доверительный коэффициент композиции СКО s(r), зависящий от закона
распределения композиции и значения доверительной вероятности.
Чаще всего метрологические характеристики
промышленных СИ нормируют традиционно в виде пределов относительных или
абсолютных погрешностей. Если есть основания полагать, что допускаемая
погрешность разных экземпляров СИ данного типа может принимать любое значение в
пределах допуска с равной вероятностью, то допускаемую погрешность измерения
плотности пульпы описанным способом (с учетом равномерного закона распределения
пределов допускаемых погрешностей, kСИ = 1,73)
можно оценить с доверительной вероятностью 0.95 согласно (7) по следующему
выражению:
| dr¶ = ±1,13 |
Ц
|
dU2¶ + dH2K¶ + dД22¶ + dR2¶ + dN2¶
|
, | |
(8) |
где dU¶ , dHK¶, dД2¶, dR¶, dN¶ - пределы допускаемых относительных погрешностей СИ
напряжения, уровня, давления, сопротивления и вычисления и округления
результата; kr=1.96/1.73=1.13 в предположении, что композиция из множества составляющих с равномерным законом
распределения (kr2=1.73) имеет закон,
близкий к нормальному (kr1=1.96).
Номинальную функцию преобразования приращения
плотности получим из (2) и (5): Dr = (U2-U0i)/K2K3i. Поскольку при
значениях плотности, близких к нижнему пределу, значение Dr приближается к нулю, то вместо
относительной введем приведенную погрешность измерения приращения плотности в
виде D(Dr)/rH, где D(Dr) -
абсолютная погрешность измерения приращения плотности. Композиция СКО
приведенной погрешности измерения приращения плотности будет определяться в
соответствии с номинальной функцией преобразования следующим образом:
| s(Dr) = |
Ц
|
[s2(K2) + s2(K3i)]Dr2/r2Hi + [U22s2(U2) + U20is2(U0i)]/r2HiK22K23i + s2(N)
|
, | |
где
s2(U0i) = s2(UИ) + [s2(R0) + s2(R1i)]R1i2/(R0 + R1i)2;
s(K2), s(K3i), s(UИ), s(R0), s(R1i) - СКО относительных погрешностей
соответственно преобразования плотности в напряжение, преобразователя
П3, ИСН, номиналов сопротивлений R0 и R1i.
Переходя к пределам допускаемых погрешностей применяемых СИ, полагая одинаковыми
погрешности измерений напряжений и классы номиналов сопротивлений, а также
принимая во внимание (1), (5) и (8), определим оценку допускаемой относительной
погрешности измерения приращения плотности аналогично (8):
|
|
|
| · |
ж
ъ
Ц
|
|
ж
з
и |
|
Dr
rHi
|
ц
ч
ш |
2
|
(dHK2 + dД22 + dK32) + |
r2 + r2Hi
r2HiK23i
|
dU2 + |
й
к
л |
|
ж
з
и |
|
Dr
rHi
|
ц
ч
ш |
2
|
+ |
2R21i
(R0 + R1i)2K23i
|
щ
ъ
ы |
dR2 + dN2 |
|
. | | |
| |
(9) |
Оценка допускаемой относительной погрешности
измерения уровня пyльпы по формуле
производится
аналогичным образом. В результате получается
| dH = ±1.13 |
Ц
|
2dU2 + dHK2 + dД12 + dД22 + 2dR2 + dN2
|
. | |
(10) |
Для расчета погрешностей (8) и (9) необходимо
иметь значения входящих в них пределов допускаемых погрешностей. Напряжения
U1 и U2 можно измерять с погрешностью dU¶ = 0.1%. Предел
допускаемой основной погрешности дифманометра класса точности 0.2 определяется
по формуле [5] dД2¶ = 0,2DPB/DP, откуда для верхнего предела DPB = 4 кПа и текущего значения разности давлений
DP = 2.4 кПа (для требуемых пределов rH = 1.2 · 103 кг/м3, rB = 1.6 · 103 кг/м3 при
HK = 0.2 м), получим: dД2¶ = 0.34%. Измерение
межколокольного расстояния можно произвести с абсолютной погрешностью не более
±1 мм, поэтому при HK = 0.2 м погрешность
dHK¶ составит не
более 0.5%. Применяя в качестве RH прецизионный резистор типа С2-29В,
можно принять dR¶
Ј 0.1%. Примем dN¶ = 0.1%.
С учетом определенных пределов допускаемых
относительных погрешностей СИ получим: dr = 0.71%, dDr = 1.95% (для наихудшего случая,
когда r = rB и
Dr = rB - rHi), dH = 0.95%.
Погрешность измерения приращения плотности
Dr =
U/gHKK3KД2RH2 в
отличие от погрешности (8) дополнительно содержит погрешность dП3 » 0.1% преобразования П3 и составляет dDr¶ = 0.72%.
Выше была рассмотрена основная погрешность,
которая нормируется для нормальных условий эксплуатации. В реальных условиях
эксплуатации в преобразователях дифференциального давления типа Сапфир 22М-ДД
возникают дополнительные погрешности главным образом от изменения температуры
окружающей среды и избыточного давления.
Дополнительная температурная погрешность
преобразователя модели 2420 класса точности 0.2, выраженная в процентах от
верхнего предела измерения, на каждые 10oС изменения температуры
окружающей среды не превышает значения [5] g(t) = 0.7 · 0.2 + 0.3 · 0.2 PB/PBH, где
PB = 4 кПа - максимальный верхний предел измерений данной модели;
PBH - настраиваемый верхний предел измерений, который в
рассматриваемом случае составляет от 2.3 до 3.1 кПа (в зависимости от rB). Подставляя значение PBH = 2.3 кПа
(наихудший случай), получим g(t) = 0.24%/10oС.
Дополнительная погрешность преобразователя,
вызванная изменением избыточного давления в пределах ±PИВ (где PИВ = 4 МПа - предельно допустимое избыточное давление для
модели 2420), не должна превышать [5] g(p) = ±0.2 PB/PHB »
±0.35%.
Тогда предел допускаемой относительной
погрешности измерения плотности пульпы в рабочих условиях можно вычислить по
формуле
| dr¶ = ±1.13 |
Ц
|
dU2¶ + dHK¶2 + dД2¶2 + dR2¶ + g2(t) + g2(p) + dN2¶
|
= 0.86%. | |
Аналогично получаем для dDr =
2.00%.
Для исключения систематической составляющей
погрешности при измерении плотности способом (2) можно провести калибровку
системы измерения. Для этого необходимо создать пульпу с различными, но близкими
к среднему значениями плотности и измерять соответствующие этим значениям
напряжения U2 с высокой точностью (±0.1%)
цифровым вольтметром. Для повышения точности измерения r целесообразно провести многократные измерения и в качестве
действительного значения взять среднее арифметическое значение: rcp = M/nV, где M- суммарная масса отобранной
пульпы, кг; V - объем мерного сосуда, м3; n - частота измерений.
Учитывая, что закон распределения композиции
из двух составляющих с равномерным законом распределения является
трапецеидальным, вычислим допускаемую относительную погрешность измерения rcp с доверительной вероятностью 0.95 для dM¶ = 0.1% и dV¶ = 0.2% по выражению
drcp.¶ =1.03 = 0.23%.
Это означает, что калибровку исследуемого измерительного устройства предлагаемым
способом можно проводить с неисключенной случайной составляющей систематической
погрешности, допускаемый предел которой равен 0.23%.
= 0.23%.
Это означает, что калибровку исследуемого измерительного устройства предлагаемым
способом можно проводить с неисключенной случайной составляющей систематической
погрешности, допускаемый предел которой равен 0.23%.
Государственный инженерный университет
Армении
Литература
1. Козин В. З., Троп
А. Е., Комаров А. Я. Автоматизация
производственных процессов на обогатительных фабриках. Учебник для вузов. М.
Недра. 1980. 336 с.
2. Микропроцессорный локальный регулятор-датчик уровня пульпы МИЛОР -
Д/УП2. Техническое описание и инструкция по эксплуатации К003.000.000.ТО. АН
СССР, Центр автоматизации процессов управления в народном хозяйстве. Капанское
научно-производственное отделение. Капан. 1998. 40
с.
3. Иордан Г. Г., Юровский
А. Я. - АКТА ИМЕКО. 1982.
С.115-124.
4. Преобразователь
измерительный Сапфир-22. Техническое описание и инструкция по эксплуатации
08919030 ТО. М. ВНИИПМ. 1988. 114 с.
5. Иордан Г. Г., Юровский А. Я., Смирновский А. Г., Сердюков
В. И. - Приборы и системы управления. 1990. N11. С.
27-30.